
Ümit Şen
Hi! My name is Ümit. I am a graduate researcher at the University of Massachusetts Amherst, advised by Prof. Gina Olson. My research investigates how the compliance seen in snake locomotion can be translated into robotics. I design and build soft snake robots that take their inspiration from nature.
Previously, I conducted research on haptics at Kadir Has University under the supervision of Prof. Mine Sarac. There I developed a wearable haptic device and worked on gamifying haptic user studies.
Before that, my first research experiences were in robot swarm coordination and visible light positioning.
Research

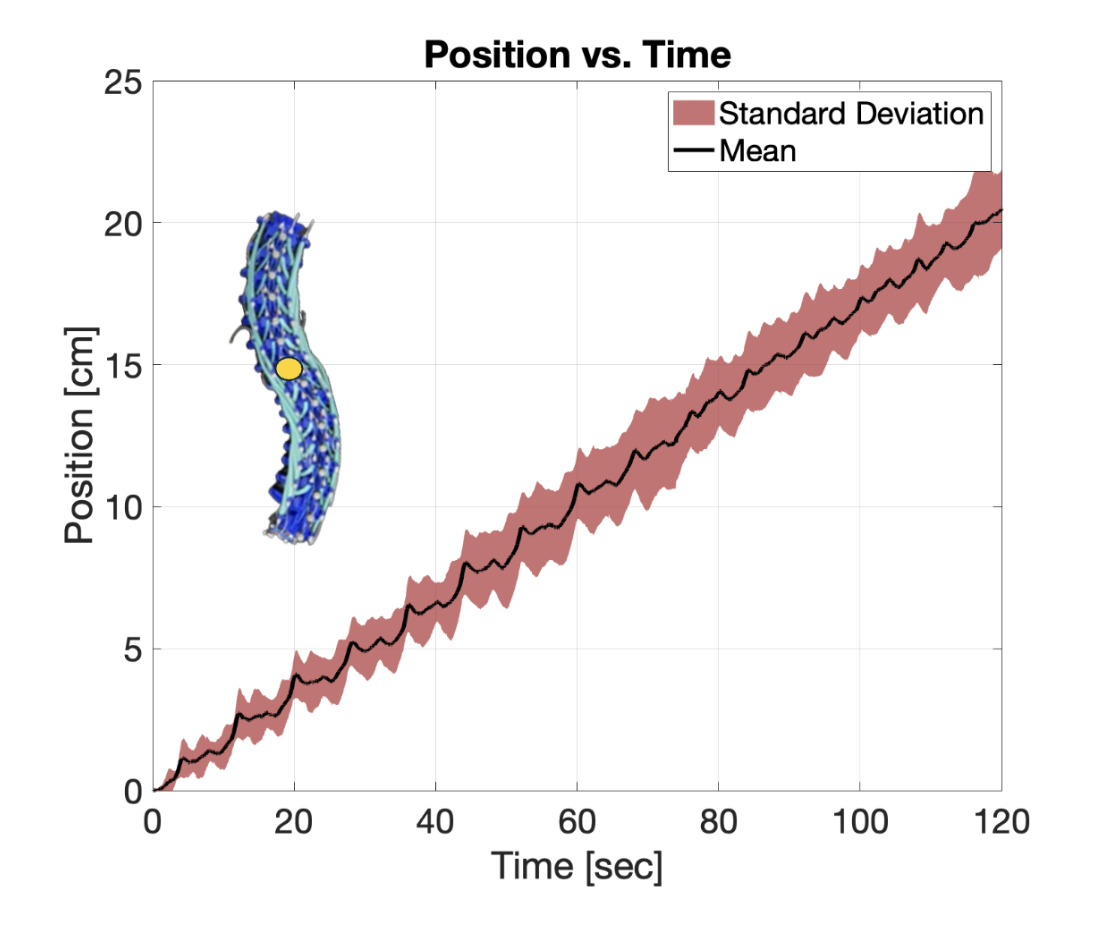
Characterization and Correlation of Robotic Snake Scale Friction and Locomotion Speed
2026 IEEE 9th International Conference on Soft Robotics (RoboSoft), Kanazawa, Japan, 2026, pp. 786–793
A Highly Articulated Backbone for Soft Snake Robots
Biomimetic and Biohybrid Systems (Living Machines 2025), Lecture Notes in Computer Science, vol. 15582, Springer, Cham, 2026
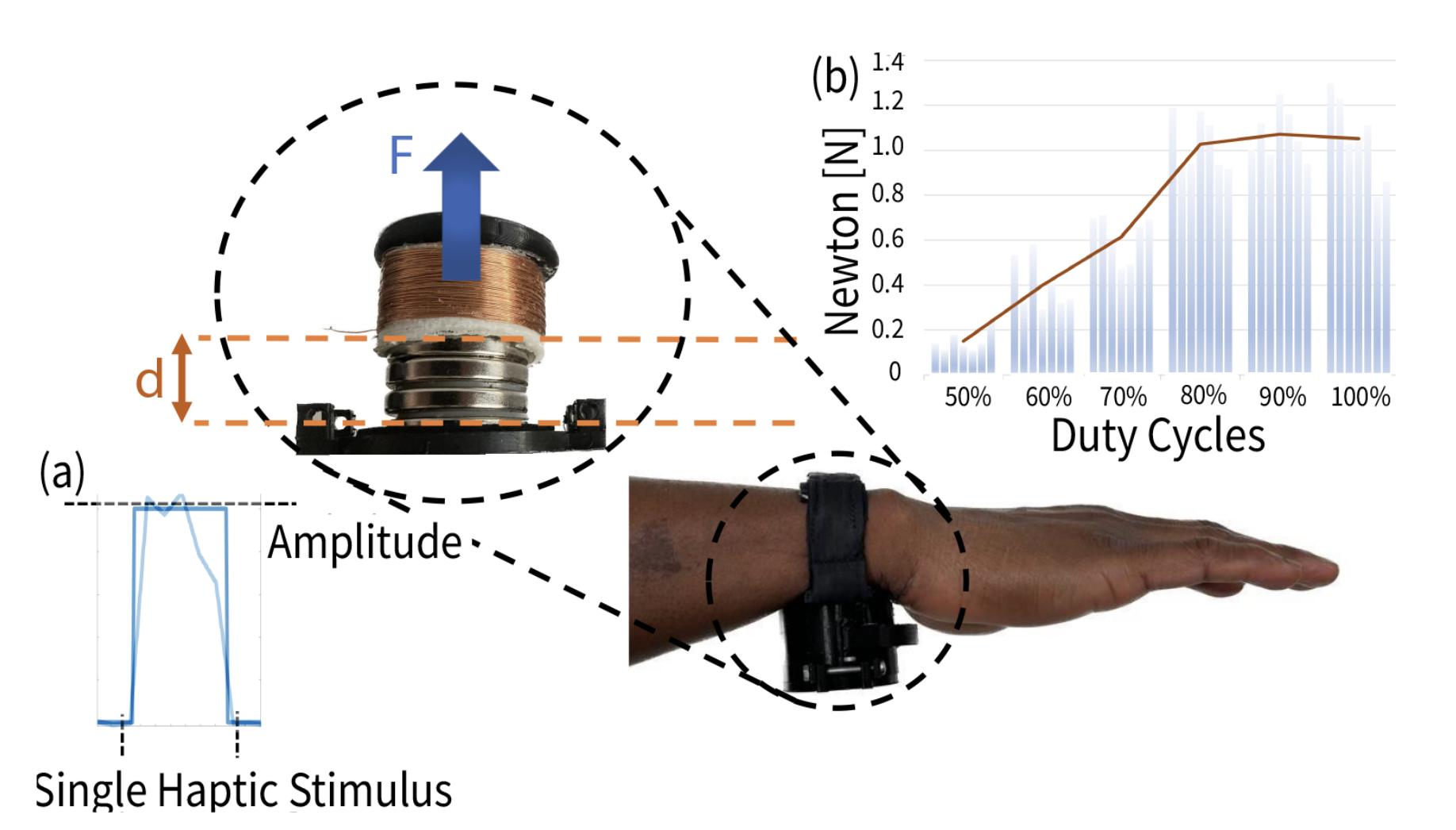
Hand Dominance and Congruence for Wrist-Worn Haptics Using Custom Voice-Coil Actuation
IEEE Robotics and Automation Letters, vol. 9, no. 4, pp. 3053–3059, Apr. 2024
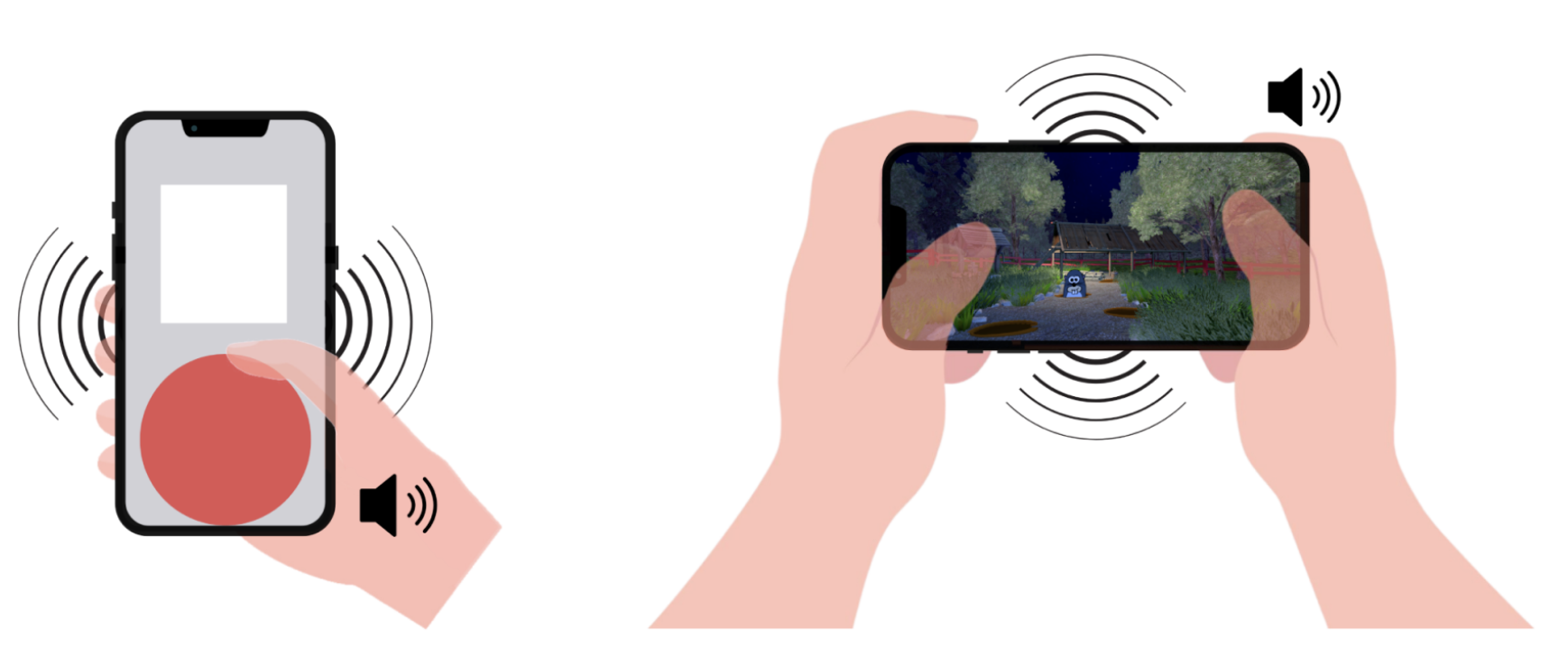
Gamifying Haptics User Studies: Comparison of Response Times From Smartphone Interfaces
IEEE Transactions on Haptics, vol. 18, no. 2, pp. 423–429, Apr. 2025
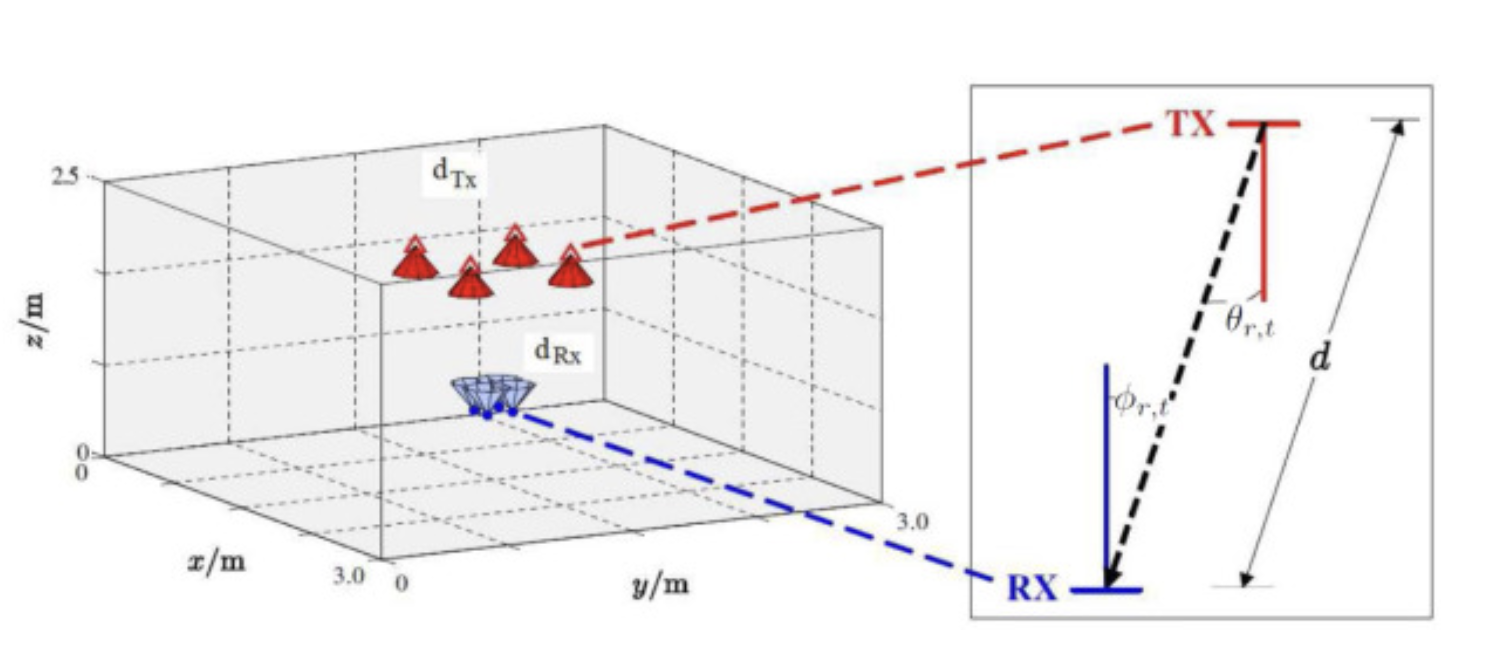
3D Indoor Positioning with Spatial Modulation for Visible Light Communications
Optics Communications, vol. 529, p. 129091, Feb. 2023
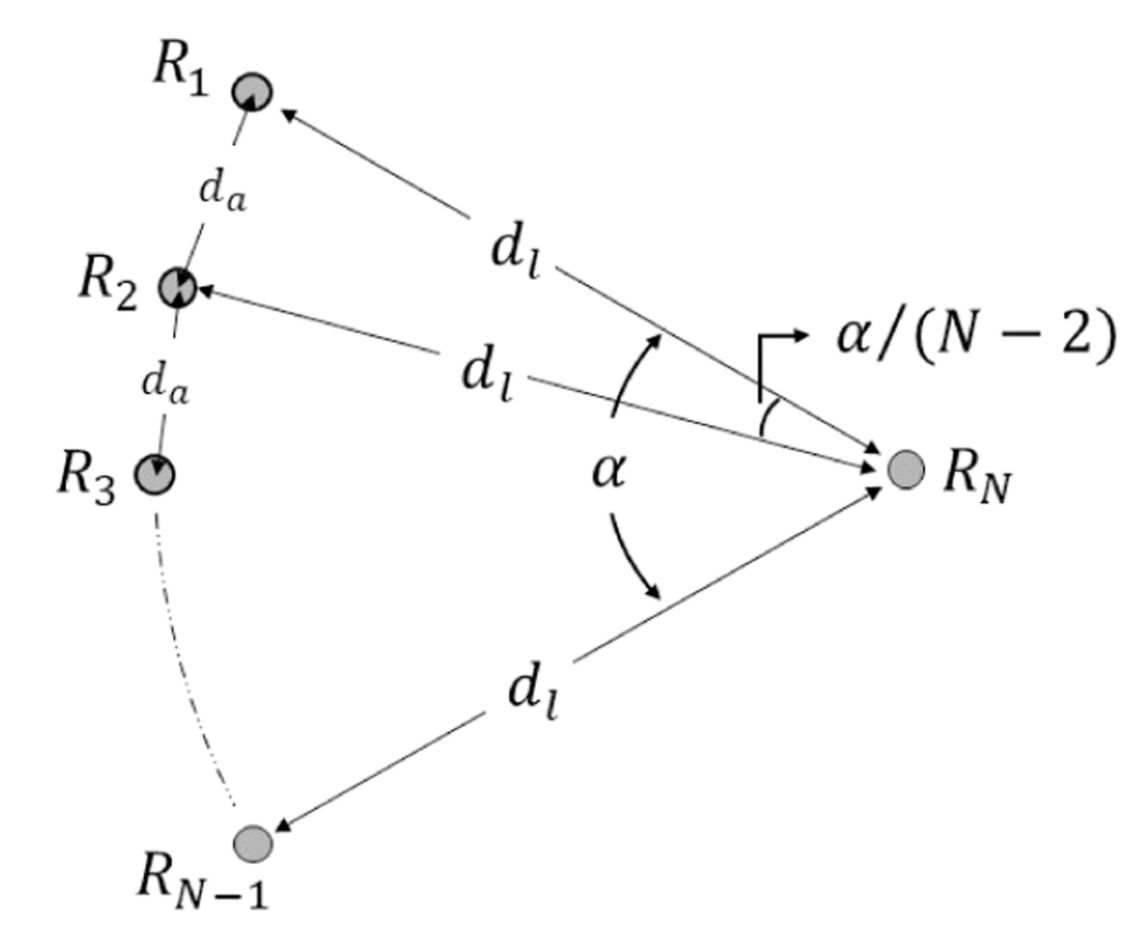
Circular Formations of Non-Communicating Robot Groups via Local Strategies
Adaptive Behavior, Aug. 2024